マグネットハンド
Magnetic hands
製品紹介
マグネットハンドは、鉄心とコイルで構成され、電流の磁気作用で電流を流している間だけ磁性体を吸着させる電磁石アクチュエータです。
構造がシンプルで、信頼性も高くコンパクトで強力な機能部品です。
タカノマグネットハンドは吸着時の残留磁気を抑えた高性能設計です。
-
直流電力で動作する高効率、高出力の電磁石です。
省電力で強力な吸引、吸着力を発揮します。
消費電力と磁気空隙(吸着面間)を変えることで任意の吸引(吸着力)特性が得られます。
-
低残留磁気吸引力です。
残留磁気吸引力を抑えた高性能設計です。
-
軽量、小型、コンパクト設計で省スペースを実現します。
コンパクトで信頼性の高い機構です。
構造がシンプルで経済的です。
-
長寿命、高信頼設計です。
機械的強度、耐久性に優れています。
-
特殊対応可能です。
さらに高出力タイプ、外形寸法等、特別仕様にも応じます。

シリーズ一覧
薄型・軽量型マグネットハンドTMH3015

- 吸着力100N以上の強力保持
- 薄型・軽量で狭いスペースの取付に最適
- 低残留磁気設計で高速離脱
用途例
- 自動接部機器のチャック
- 磁気ロボットハンド
- 金属不純物の吸着除去
- 搬送機の走路変更
| シリーズ | 外径(㎜) | 直流抵抗 | 保持力(N) | 資料 | |
|---|---|---|---|---|---|
| 12V | 24V | ||||
| TMH-3015 | φ30×15 | 56Ω | 90 | 170 | |
高保持型マグネットハンドTMH3029A

- 吸着力150N以上の強力保持
- 低残留磁気設計で高速離脱
用途例
- 自動接部機器のチャック
- 磁気ロボットハンド
- 金属不純物の吸着除去
- 搬送機の走路変更
- ミニラボ:ネガ固定ユニット駆動
| シリーズ | 外径(㎜) | 直流抵抗 | 保持力(N) | 資料 | |
|---|---|---|---|---|---|
| 12V | 24V | ||||
| TMH-3029A | φ30×29 | 56Ω | 50 | 60 | |
動作例
磁気ロボットハンド
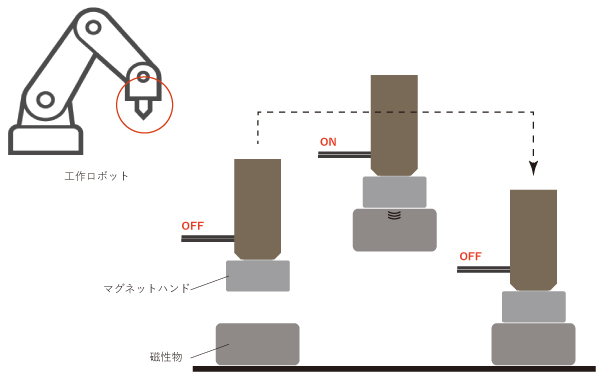
- OFF時には磁界は発生しません、ONにすることで磁界が発生し、磁性物を吸着し保持することができます。
- ロボットの磁気ハンドで、電源のON/OFFにより物体の吸着→移動→離脱が簡単に行えます。