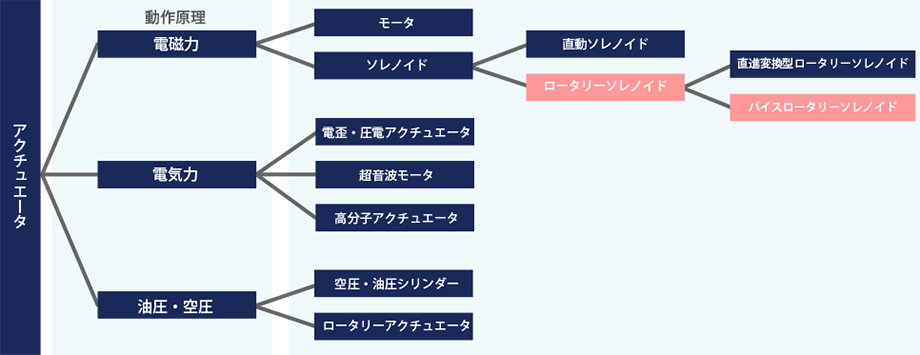
バイスロータリーソレノイドとは
Bi-Stable Rotary Solenoid
バイスロータリーソレノイドとは、電磁力を利用して往復回転動作(揺動運動)をするアクチュエータで回転ソレノイドとも呼ばれます。
電磁力を利用して連続回転動作をするモーターとは異なり、限定された角度領域で使用されます。
ロータリーソレノイドの用途
ロータリーソレノイドは、2点間の揺動運動を得意とし、高速・高トルクであることから選別やシャッター、角度切り替え当の駆動系の動力源として利用されます。
搬送装置
ATM
自動ロボット
宇宙関連機器
自動織機
タカノのバイスロータリーソレノイドの構造と特長
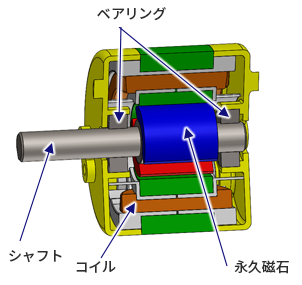
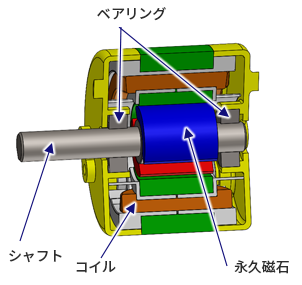
ロータリーソレノイドは、直進力を内部で回転運動に変換するタイプ(直進変換型ロータリーソレノイド)と回転子自体が直接回転して回転運動するタイプ(バイスロータリーソレノイド)の2つの種類があります。タカノのソレノイドは後者になり、モーターに近い構造をしています。
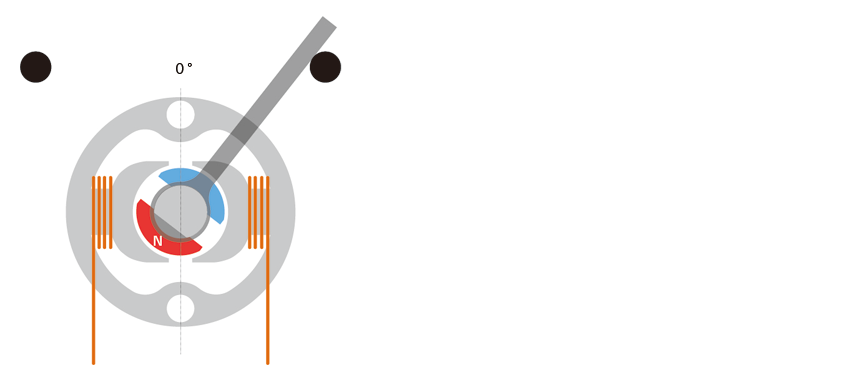
回転子は永久磁石とシャフトで構成されていて、シャフトが軸受け(ベアリング等)に支えられて回転します。
固定子(ステーター)にはコイルが形成されコイルへの通電方向の切り替えにより往復回転動作を行います。
特長1 無通電自己保持力がある
2点間を揺動運動する際に、両角度で無通電自己保持が発生します。
低電力、低発熱で自己保持が可能です。
特長2 専用回路が不要で、制御が簡単である
接続する電気線は2本で、DC 電源の+とーの向きを交互に切り替えるだけで揺動運動が可能です。
特長3 長寿命である
ブラシ付きモーターの様なブラシがなく、シャフトのスラスト方向への動きも発生しません。軸受け部以外に接触箇所はないため、軸受けの寿命に依存します。
軸受けにベアリングを使用することで長寿命となります。
特長4 超高速動作が可能である
瞬間的な磁力の吸引と反発により動作する構造の為、応答時間10ms以下で動作させることも可能です。
直進変換型ロータリーソレノイドと比較した構造の違い
構造は大きく異なります。また構造上の違いにより特性も異なります。それぞれのメリット・デメリットがございますのでご使用方法に合わせてご検討ください。
|
一般的な 直進変換型ロータリーソレノイド |
バイスロータリーソレノイド |
| 駆動原理 |
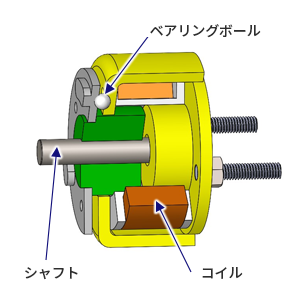
直動ソレノイドを応用し、通電による可動部の吸引力をベアリングボールと特殊なボール溝によって回転運動に変換する
|
モーターと同様で、通電によって発生したコイルのN,S 極に回転子の永久磁石が引き合ったり反発したりすることで回転運動をする
|
| 構造 |
|
|
| 位置制御の保持電力 |
保持には通電が必要な為、浪エネ・発熱大
|
両側を永久磁石の吸着力で無通電自己保持するため省エネ、低発熱
※片側のみ保持するバネ復帰タイプもあり
|
| 復帰方法 |
自重又は取付負荷の重量で復帰
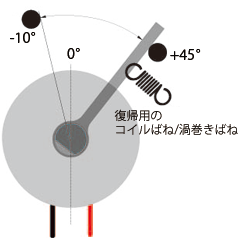
バネ復帰
|
磁気復帰(内部の永久磁石により復帰する)
通電復帰
バネ復帰
|
通電トルクの大きさ
※同じサイズ・電力・使用角度で比較 |
強い
|
やや劣る
|
| シャフトのスラスト方向の動き |
機構上1~3mm スラスト方向に動くため、動きを規制しないように配慮が必要
|
スラスト方向の動きがない
|
| 回転角度域 |
0 ~ 95°
|
5 ~ 90°
|
応答時間
※同じサイズ・電力・使用角度で比較 |
劣る
|
速い
(特に両励磁駆動は回転方向を問わず高速かつ応答時間のバラツキが少ない)
|
モーターと比較した構造の違い
タカノのロータリーソレノイドは、回転子と固定子で構成されている点はモーターと似ていますが、構造はよりシンプルです。
回転子は2極の永久磁石で構成され、固定子も2相のコイルしかありません。
この独特な構造により一回転する機能を持たない替わりに限定された角度領域において高速・無通電自己保持力という機能を持っています。
比較モーターの構造図
|
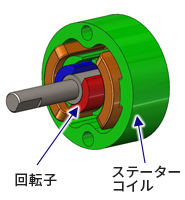
バイスロータリーソレノイド |
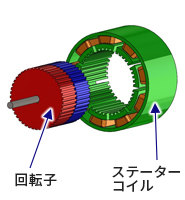
ステッピングモータ |
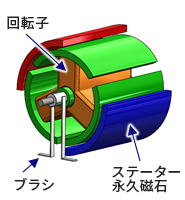
ブラシ付きDCモーター |
ブラシレス DC モータ |
| 代表的な構造 |
 |
 |
 |
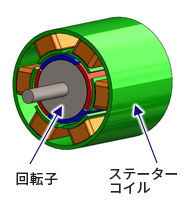 |
| 回転子 |
永久磁石 |
永久磁石 |
コイル |
永久磁石 |
| 特徴 |
・90°以内の揺動運動専用
・揺動運動において最速
・駆動制御がシンプルな回路で構成可
・揺動運動には外部ストッパーの設計がセットで必要となる
|
・入力パルス数に比例して回転角度が決まる
・オープンループで位置制御が可能
・低速回転が得意
・専用の駆動回路が必要で、脱調するリスクを伴う
|
・入力電圧に比例して回転数や出力を制御できる
・位置制御にはセンサとのクローズドループ制御が必要
・安価
・ブラシがの寿命が短くメンテナンスが必要
|
・ブラシがない為、ブラシ付きDCモーターに比べて高寿命で静音性が高い
・位置制御にはセンサとのクローズドループ制御が必要
・専用の駆動回路が必要となる。
|
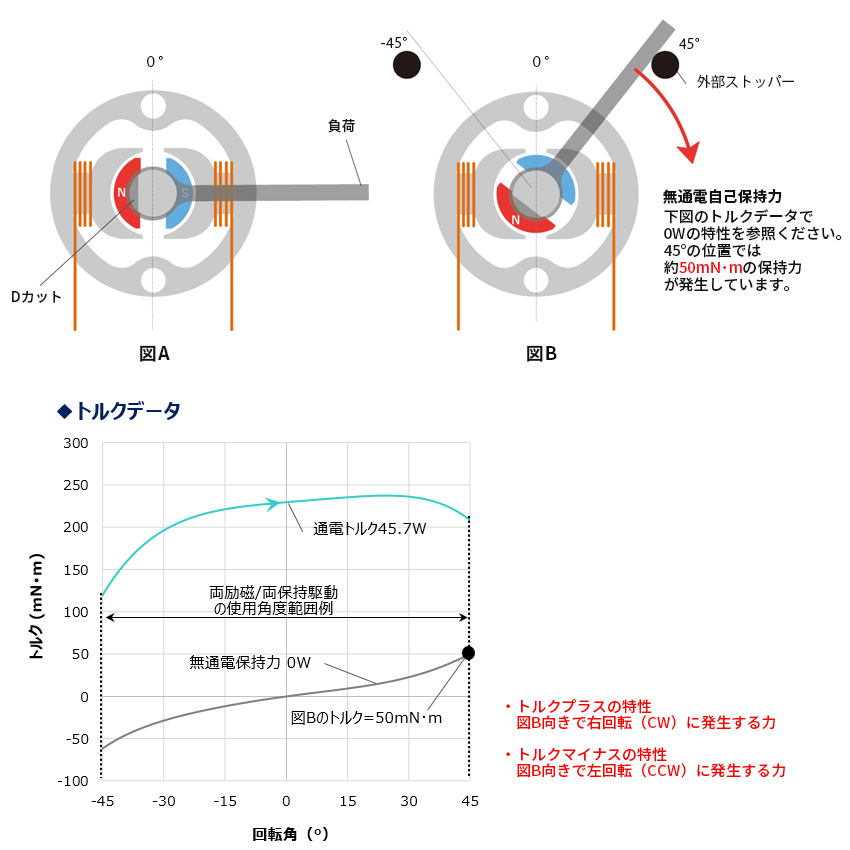
無通電自己保持力が発生する原理
無通電状態では、回転子の永久磁石は図Aの状態で力が釣り合い静止します。
外部ストッパーを図Bのように配置すると、回転子は図Aの状態になりたがるため、赤矢印の向きに力が働きます。これが永久磁石によって生まれる無通電自己保持力です。反対側のストッパーでも同トルクの無通電自己保持力が発生します。
保持力の大きさはストッパーの設置角度によって異なります。
各製品のトルク特性図をご確認ください。
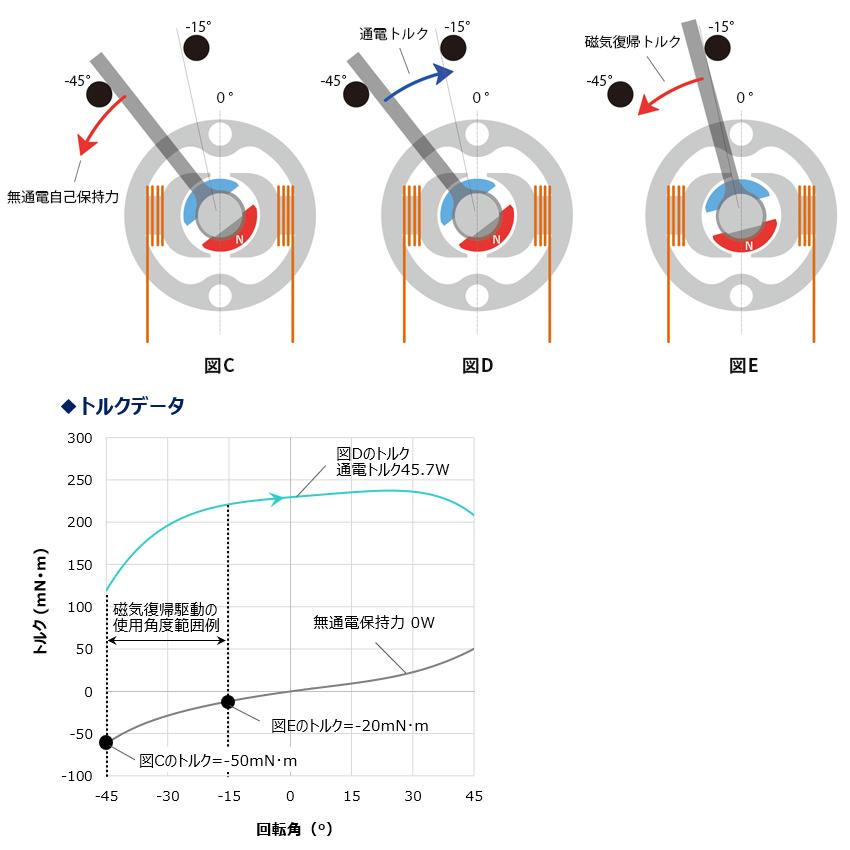
無通電自己保持力の応用例(磁気復帰型)
永久磁石による自己保持力を活かして磁気復帰させることも可能です。
使用角度はより限定されますが、図Cの様に振分け70°位置に対して、-45°と-15°の位置に外部ストッパーを設置します。-45°の位置では-50N・mの保持力が左回回転方向に発生します。通電時は右回転側に通電トルク(青色の線)が発生し、右回転をします。(図D)
-15°のストッパーで静止後(図E)に通電を切ると、0Wのトルク特性は-20N・mである為、CCW側に磁気復帰します。
フェールセーフを目的とした設計や復帰ばねが不要なため、高耐久でご使用いただけます。
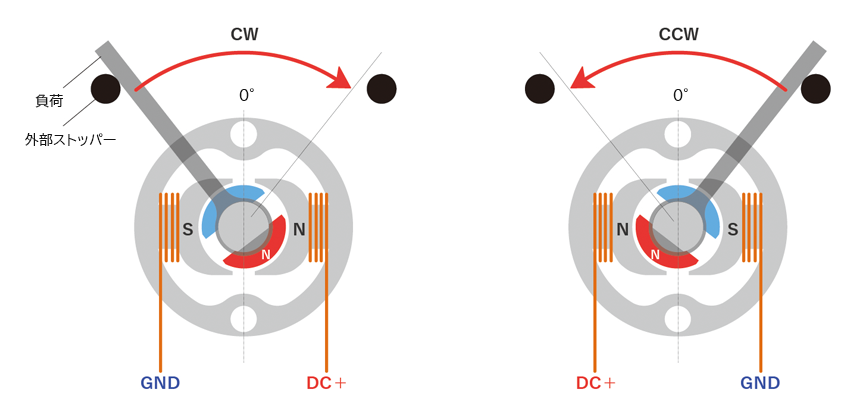
回転動作する原理
コイルに通電すると2相のコイルにより固定子はそれぞれN極とS極に磁化されます。
回転子の永久磁石はコイルによって発生した磁界に反発して回転をします。逆側に回転させる場合は、通電方向を逆にすることで簡単に逆回転が可能です。
過負荷を加えない限り、途中で回転動作が止まることはありません。
回転時の通電トルクは外部ストッパーの設置角度や印加電圧により異なります。各製品のトルク特性図をご確認ください。
ロータリーソレノイド VS モーター
ロータリーソレノイドは、限定された角度域の往復運動や位置決め用途に優れたパフォーマンスを発揮します。
以下の比較表をご参考ください。
|
バイスロータリーソレノイド |
ステッピングモーター |
ブラシ付きDCモーター |
| 駆動回路 |
○ 専用ドライバ不要 |
× 専用ドライバ必要 |
○ 専用ドライバ不要 |
| 回転角度域 |
× 90°以内の制限あり |
○ 360°制限なし |
○ 360°制限なし |
| 位置制御方法 |
△ 2点間の外部ストッパー角度で決まる |
○ 入力パルス信号数で360°範囲を自由に位置決め可能 |
△ 位置決めをするには位置センサが必要 |
| 位置制御精度 |
△ ストッパー位置の組立精度に依存 |
○ 高精度 |
× 粗い |
| 位置制御の保持電力 |
○ 無通電保持可能で省エネ・低発熱 |
× 保持には通電が必要なため、浪エネ・発熱大 |
× 保持には通電が必要なため、浪エネ・発熱大 |
| 耐久性 |
○ 長い:軸受け寿命で決まる |
○ 長い:軸受け寿命で決まる |
× 短い:ブラシと整流子の摩耗で制限される |
| 応答時間 |
○ 高速 / 脱調なし |
× 低速 / 高速動作により脱調リスクあり |
○ 高速 / 脱調なし |
ご使用方法・事前準備
ロータリーソレノイドの駆動には、直流電源と電気回路、外部ストッパーの3点が別に必要となります。
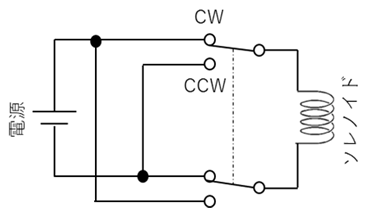
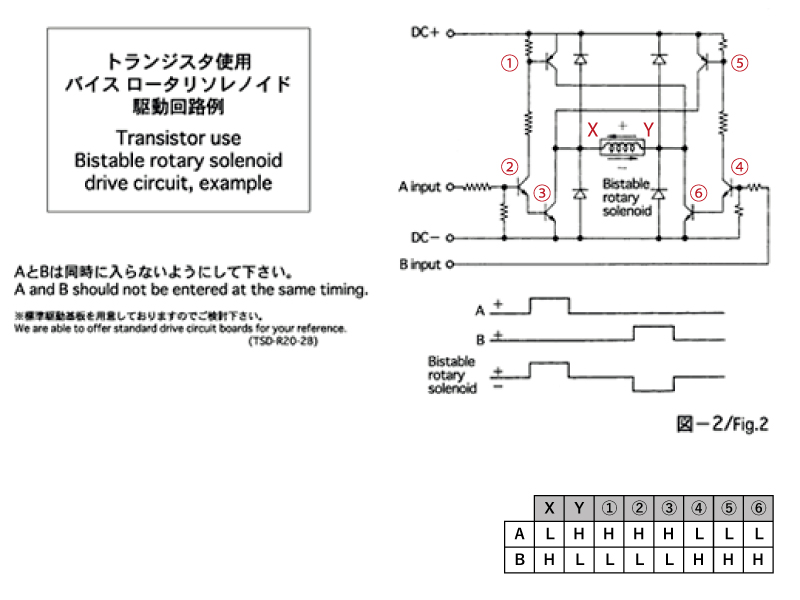
- 駆動電気回路
電源電圧の通電方向をスイッチを使って切り替えることで往復動作します。
動作完了後は自己保持するため、通電を切ってお使いいただくと消費電力や発熱を抑制し、高効率でご使用いただけます。
図-2は代表的な駆動回路図です。なおソレノイド関連商品として、駆動回路基板も用意しております。
-
外部ストッパーの設置方法
ロータリーソレノイド本体には、一部機種を除きストッパーが内蔵されていません。
動作角度を機械的に規定するストッパーを設けてください。
-
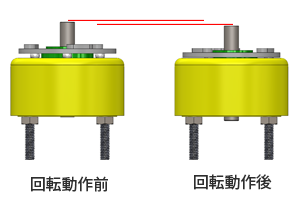
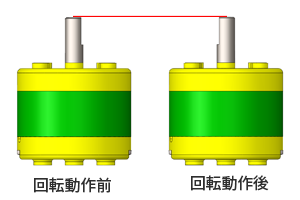
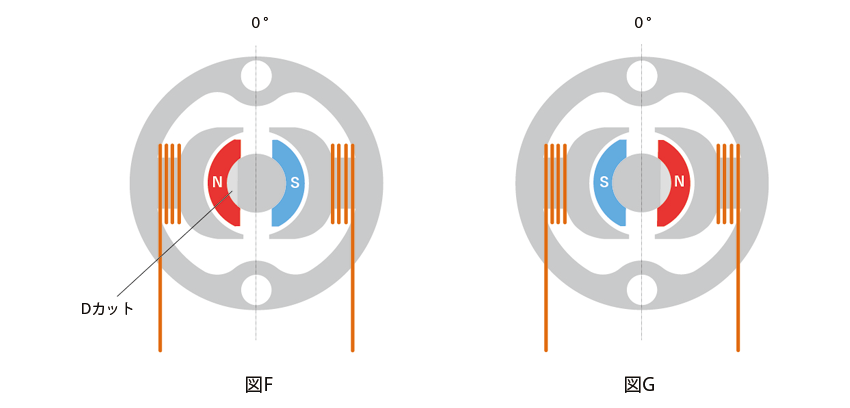
開封時(ストッパーがついていない状態)は、永久磁石とシャフトDカットの位置関係は下図F)もしくは、G)の状態で安定して(磁力がつりあって)います。
-
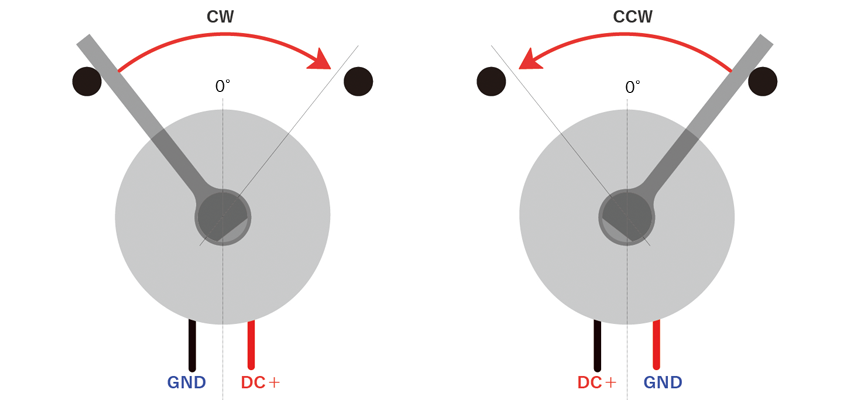
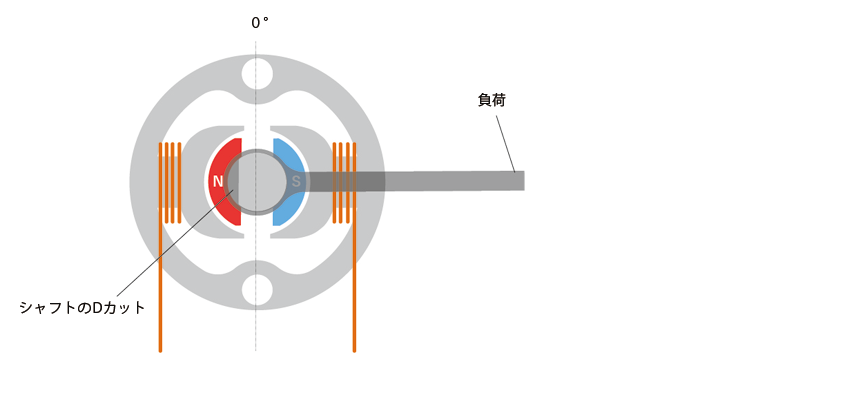
Dカットを利用して、シャフトに回転させる負荷を取り付けてください。
-
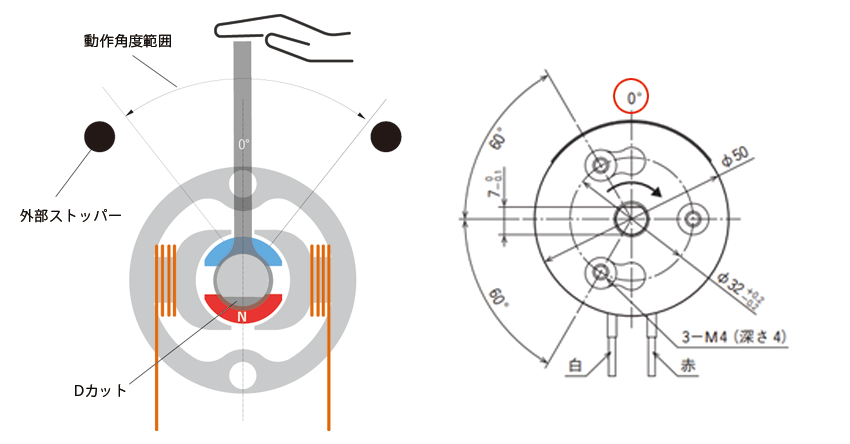
負荷を0°付近へ移動させ、外部ストッパーを揺動運動したい角度へ取り付けてください。
0°の位置は機種によって異なります。カタログの外観図に0°位置が示されていますのでご参考ください。外部ストッパー設置後に手を離すとどちらかの外部ストッパー側へ磁力によって自転します。
ご注意:ストッパーには、ゴム等の緩衝材を使用してください。金属同士のストッパーは、衝撃が強く故障の原因になりますので、避けてください。
-
以上で設置は完了です。この状態で通電時に動作しない場合は、以下の可能性が考えられます。
①通電の±が逆
→対策:通電方向を逆にしていただき、動作をご確認ください。
②負荷が重すぎる
→対策:負荷を軽くする、印加電圧をあげる、動作角度を狭くする等の対策をしてください
③ストッパーの設置位置が正しくない
→対策:ご使用機種の0°位置を基準に外部ストッパーが設置されているかご確認ください。
④Dカットの向きが0°位置に対して逆
→対策:Dカットの向きと0°位置を確認してください。
製品選定ガイド
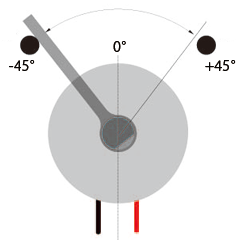
手順① ストッパー取付方法と回転角度を決定
ご使用用途に合わせて、動作角度を決定してください。
スタンダードな両自己保持取付に加えて、角度はより限定されますが、復帰時に通電が不要で、より低電力でご使用いただける磁気復帰、ばね復帰駆動も選択できます。
|
両自己保持駆動 |
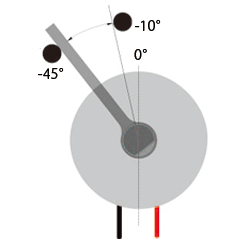
磁気復帰駆動 |
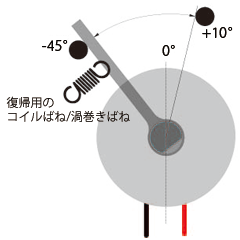
ばね復帰駆動 |
| CCW磁気復帰 |
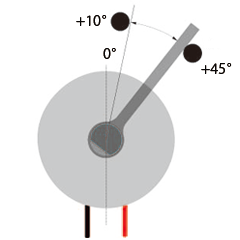
CW磁気復帰 |
CCWばね復帰 |
CWばね復帰 |
|
|
|
|
|
| 特徴 |
・最もスタンダードな駆動方法
・最も広角で使用が可能
・両角度で自己保持する
|
・復帰動作は永久磁石の磁力で行うため両自己保持取付に対して省電力です。
・ばね等の復帰させるメカ機構が不要な為、ばね復帰駆動よりも耐久性が高く、ばねの設計、組立作業が不要です。
・電気が切れた場合でも復帰する為、フェールセーフ設計が可能です。
|
・復帰動作はばね力で行うため両自己保持駆動に対して省電力です。
・磁気復帰駆動よりも信頼性は低下しますが、より広角で使用可能です。
・電気が切れた場合でも復帰する為、フェールセーフ設計が可能です。
|
| 無通電自己保持 |
左ストッパー:無通電自己保持
右ストッパー:無通電自己保持
|
左ストッパー:無通電自己保持
右ストッパー:保持無し
|
左ストッパー:保持無し
右ストッパー:無通電自己保持
|
左ストッパー:ばね荷重保持
右ストッパー:保持無し
|
左ストッパー:保持無し
右ストッパー:ばね荷重保持
|
外部ストッパー
設置角度目安 |
最大角度90°
左ストッパー位置:-45以上
右ストッパー位置:+45°以下
|
最大角度程度35°
左ストッパー位置:-45°
右ストッパー位置:-10°
|
最大角度程度35°
左ストッパー位置:+10°
右ストッパー位置:+45°
|
最大角度55°
左ストッパー位置:-45°
右ストッパー位置:+10°
|
最大角度55°
左ストッパー位置:-10°
右ストッパー位置:+45° |
CW回転
(上図右回転) |
通電
|
通電
|
磁気復帰(通電不要)
|
通電
|
ばね復帰(通電不要)
|
CCW回転
(上図左回転) |
通電
|
磁気復帰(通電不要)
|
通電
|
ばね復帰(通電不要)
|
無通電でばね復帰
|
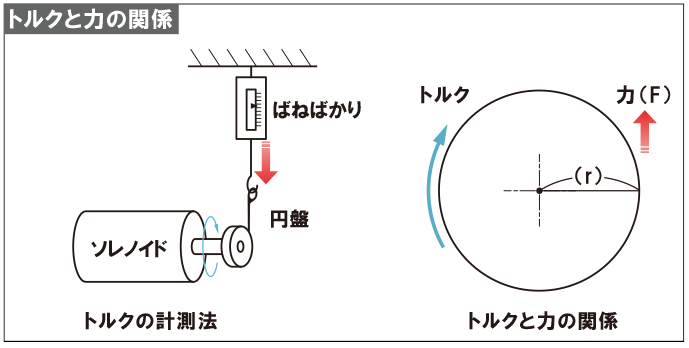
手順② 必要トルクを算出
回転体の負荷トルクの算出方法
T =F × r[N・m]
T=トルク[N・m]
F=取付負荷による外力[N]
r= 半径[m]
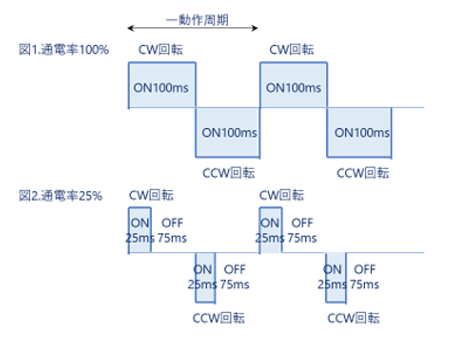
手順③ 通電率を算出
バイスロータリーソレノイドは、永久磁石の力で無通電時でも自己保持力が発生する為、作動しない時には無通電でご使用いただけます。
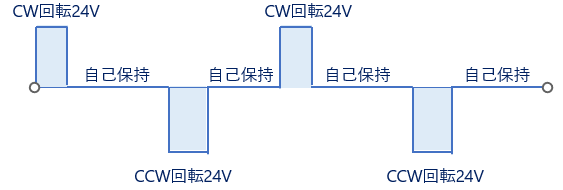
通電率とは、一動作周期中にソレノイドへ通電する時間を割合で表したもので、以下の計算式より算出できます。
ON 時間=通電時間 OFF 時間=自己保持時間
通電率 (%)=(ON時間/(ON時間+OFF時間))×100(%)
右図1の様に使用する場合は、通電率100%となります。
右図2の様に使用する場合は、通電率25%となります。
手順④ ①②③で算出した結果を元にトルク特性一覧から機種を選定